
Próteses
LINHA DO TEMPO
As próteses ortopédicas foram evoluindo no mundo ao longo dos anos. Navegue na linha do tempo e conheça essa história.
-
3500 E 1800 A.C
-
600 A.C
-
460-370 A.C
-
300 A.C
-
500 D.C. - 1500 D.C.
-
1696
-
1800
-
1863
-
1904
-
1912
-
1937
-
1948
-
1955
-
1959
-
1968
-
1971
-
1980
-
1984
-
1990
-
2012
-
2013
-
2015
Voltar para o topo

Foram encontrados os primeiros registros do uso de próteses ortopédicas em um poema do livro mais antigo da cultura hindu, o Rig Veda, escrito entre 3500 e 1800 a.C.
No poema, é mencionada a história de uma rainha guerreira que perdeu a perna no campo de batalha e colocou uma prótese de ferro para voltar à guerra.

As próteses ortopédicas mais antigas foram descobertas nas múmias de dois museus.
Têm a forma de dedão do pé direito e são de aproximadamente 600 a.C. Provavelmente, eram utilizadas por pessoas amputadas e não foram colocadas apenas durante a mumificação.
Uma das próteses era formada por três partes de madeira unidas por tiras de couro, que garantem mobilidade e funcionam como uma dobradiça. (Museu do Cairo)
Próteses de membros inferiores eram feitas de madeira e continham alças de couro.
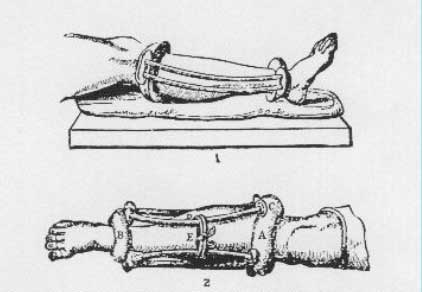
Hipócrates (460 – 370 a.C.), considerado o principal precursor da medicina, criou talas para corrigir fraturas na tíbia.
A órtese era formada por argolas de couro que envolviam a perna abaixo do joelho e acima do tornozelo.
Ripas de madeira com elásticos tensionados uniam as argolas.

Uma perna de bronze e ferro de 300 a.C. foi encontrada na região da Cápua, na Itália.

Na Idade Média, houve pouquíssima evolução científica e o conhecimento dos gregos e romanos deixou de ser utilizado.
Os maiores avanços foram a colocação de ganchos às próteses de mãos e o uso de pernas de pau.
As principais próteses eram pesadas, de ferro, e muitas vezes produzidas pelo mesmo ferreiro que fazia as armaduras.
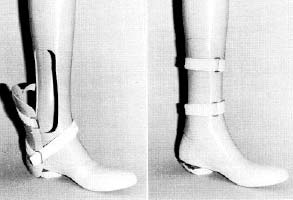
O cirurgião holandês Pieter Verduyn criou a primeira prótese transtibial articular sem travas.
É uma prótese para a região abaixo do joelho que possui uma espécie de espartilho à altura da coxa. Este é formado por dobradiças externas e couro e tem a função de sustentar o peso. O pé é de madeira.


O médico inglês James Potts criou um novo modelo de prótese: uma chapa de madeira curvada, que servia de encaixe para a coxa. Uma articulação do joelho em aço, um pé articulado e cabos feitos de fibra animal, uniam o joelho ao tornozelo de modo a permitir um movimento do pé coordenado com a flexão/extensão do joelho.
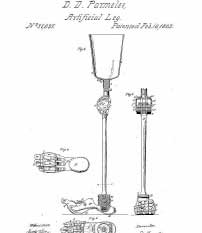
Dubois D. Parmelee patenteou a primeira prótese transfemural com encaixe de suspensão por sucção que ficava suspensa por pressão.
Desta forma, eliminava a necessidade da colocação de arneses e espartilhos. Essa tecnologia de suspensão foi desenvolvida ao longo dos anos, permanecendo em uso nos dias de hoje.
O ginasta alemão George Eyser foi o primeiro paratleta olímpico que usou uma prótese de madeira para substituir a perna direita. O atleta competiu junto à equipe olímpica americana em 1904 e conquistou seis medalhas nas Olimpíadas de verão de St. Louis em apenas um dia, sendo três ouros na ginástica artística.

A primeira prótese de alumínio é criada, reduzindo 1,5 kg em relação a próteses anteriores.
A prótese de alumínio é produzida e utilizada por Marcel Desoutter, um aviador famoso inglês, com a ajuda de seu irmão Charles, um engenheiro.

Os primeiros polímeros começam a ser aplicados nas próteses na Alemanha, quando Otto Bayer (da atual companhia Bayer) descobre a produção de poliuretano. O material é bastante versátil, podendo apresentar propriedades físicas e químicas.

Em 1948, em Stoke Mandeville, aconteceu a primeira competição para paraplégicos na abertura das Olimpíadas de Londres.
Participaram 16 atletas ingleses nas modalidades de arco e flecha, tiro ao alvo e arremesso de dardo.

Em 1955, a prótese canadense “Syme” foi produzida com uma resina termoendurecível, desenvolvida pela Northrop Aviation.
O pé preso à extremidade era feito de borracha.
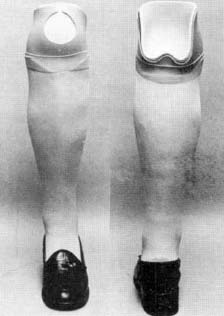
A Universidade da Califórnia desenvolve a prótese PTB (Patellar Tendon Bearing), uma evolução da prótese desenvolvida por Verduyn.
As bordas superiores do soquete encontram-se acima da linha articular do joelho e a suspensão é realizada através de uma correia na coxa, causando aos usuários uma atrofia do quadríceps.
As próteses com soquete KBM (Kondylen Bettung Münster), foram desenvolvidas na Alemanha, tornando-se o encaixe mais popular para as amputações abaixo do joelho.
O revestimento interno é flexível. A pressão que a prótese faz na região permite que ela seja sustentada sem outros acessórios.
Para dar conforto ao paciente, eram utilizados internamente cartuchos de EVA e meias. A segurança dependia totalmente do formato do encaixe.

A empresa alemã OttoBock cria próteses endoesqueléticas ajustáveis, que consistem em estruturas tubulares adaptáveis, revestidas por espuma de plástico, para que a forma seja de perna.
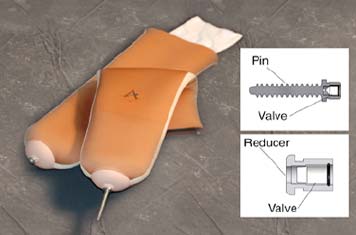
A partir da década de 1980, os liners de silicone (posteriormente, também fabricados com uretano e gel de silicone) foram a solução para os problemas de conforto e sustentação.
Essa inovação resolveu problemas até então tidos como intransponíveis: segurança, rigidez, incômodo, custo, facilidade de uso.

O norte americano Van Phillips, especialista em próteses e usuário da marca Flex-Foot, desenvolveu importantes próteses de fibra de carbono.
Phillips perdeu parte da perna em um acidente e estava insatisfeito com as próteses da época.
Em 1984, ele cria a empresa Flex-Foot.

É criada uma prótese inspirada na pata do guepardo.
A fibra de carbono é um material flexível e que absorve energia. Os milhões de fios de carbono grafite simulam ligamentos e podem produzir mais energia do que os ligamentos de um animal.
O modelo de pé “Flex-Foot Cheetah” é utilizado pelo velocista Oscar Pistorius. A prótese chegou a ser considerada mais eficiente que o pé humano nas Olimpíadas de Pequim.

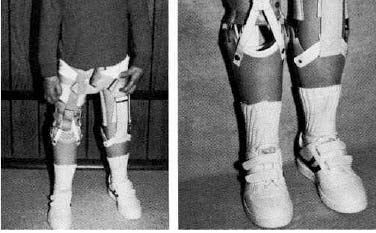
Foi criado o protótipo “Walking Assist Device”, um exoesqueleto que sustenta o peso do usuário, principalmente para tarefas que exigem agachamento por longos períodos. Com 6,5 kg, o protótipo possui dois motores elétricos recarregados por baterias, que duram até duas horas. Os sensores nos calçados permitem que o aparelho seja controlado.

Atualmente, as principais finalidades de exoesqueletos são aumento de força, fisioterapia, reabilitação e possibilidade de caminhar (para deficientes e usuários com dificuldades motoras).

Voluntários de ONGs, como a Not Impossible ou a Enabling the Future, vêm produzindo próteses de mãos e braços em impressoras 3D.
O estudante de engenharia mecânica da Universidade Feevale, em Novo Hamburgo (RS), Lucas Strasburg, desenvolveu uma prótese ortopédica de baixo custo, que utiliza materiais alternativos aos encontrados hoje nas próteses convencionais.
De acordo com seus cálculos, a prótese pode ter um preço final “até 30 vezes menor”. O desafio agora é conseguir a fabricação da prótese em larga escala. Este projeto foi um dos 19 selecionados para a mentoria do Braskem Labs, programa de incentivo a empreendedores com soluções que melhoram a vida das pessoas através do plástico, desenvolvido pela Braskem em parceria com a Endeavor.

A versatilidade do plástico permitiu que as próteses passassem a expressar o estilo da pessoa, com possibilidades estéticas, como cores, texturas e desenhos.
VEJA ALGUMAS DE NOSSAS CAMPANHAS COM OS ATLETAS PARALÍMPICOS
- 2015 - https://www.braskem.com.br/paratletismo
- 2016 - https://www.braskem.com.br/campanhasuperacao
- 2017 - https://www.braskem.com.br/diadoparatleta
- 2018 - https://www.braskem.com.br/campanha-paratletas-2018
- 2018 - https://www.braskem.com.br/portal/principal/arquivos/Campanhas/Conte%C3%BAdo%20Vogue.pdf
- 2018 - https://vogue.globo.com/marcas-parceiras/noticia/2018/09/forca-e-coragem-vogue-faz-shooting-com-paratletas-do-time-braskem.ghtml
- 2019 - https://www.braskem.com.br/paratletas_2019
- 2020 - https://www.braskem.com.br/paratletas